
貨物船Nomadic MildeとバルカーAtlantic Venusの衝突1
船舶の運航課程の中で、バース待ち、修理、補油等のために錨泊をする機会は少なくありません。錨泊中には外力、錨の型式と重量、底質、把駐力等いろいろな要素が関わりますが、近年船舶が大型化していくなかで、そのバランスが崩れることが多く、結果として錨泊中に走錨することがあります。その走錨は、座礁や衝突といった海難につながり、船舶や構造物、あるいは海洋環境に大きな被害をもたらします。本稿では、「走錨と海難」に関する具体的な事例を示すとともに、その走錨防止に関し検討したいと思います。
概要
2020年5月8日、現地時間の1655時、米国ルイジアナ州ニューオーリンズ近くのミシシッピ川下流で、錨泊中の一般貨物船Nomadic Milde(N号)が強い流速(4ノットから5ノット)の中で振れ回り、その結果走錨し、錨泊中のばら積み貨物船Atlantic Venus(A号)に衝突しました。A号と衝突した後、N号は近くの化学製品岸壁に衝突し、浅瀬に座礁しました。怪我人は報告されていませんが、N号は推定50リットルの潤滑油を川に流しました。これにより船舶と岸壁の両方への損害は1690万ドルと推定されています。

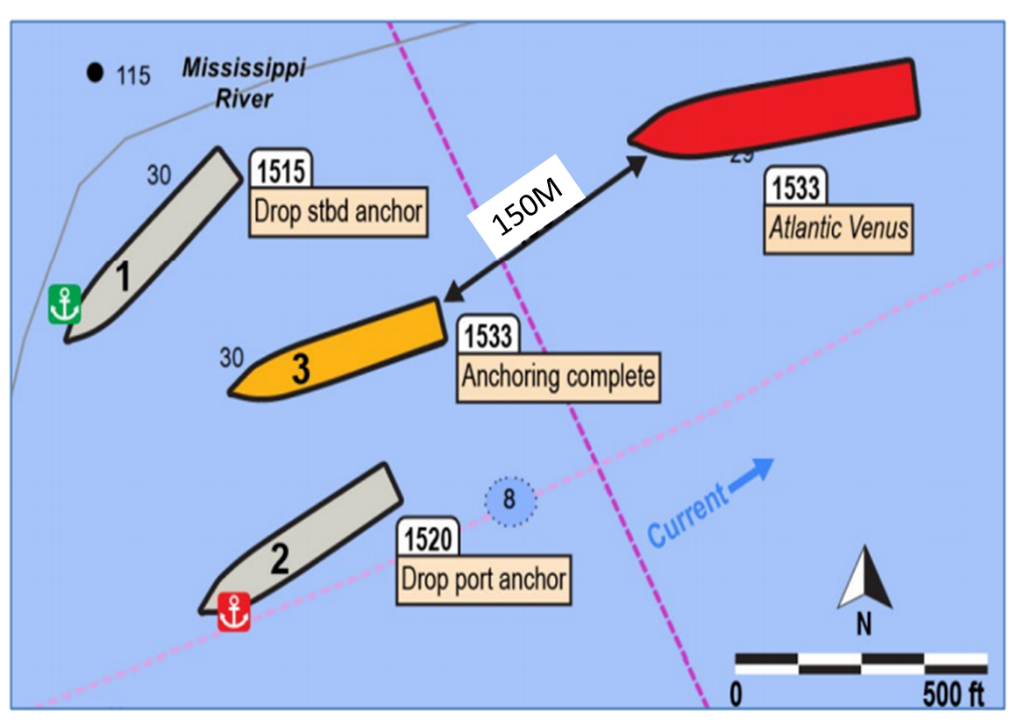
図-12 5月8日1533時 錨泊中の船舶の電子海図上のAISシンボル(NTSB)
船舶要目
Nomadic Milde
全長138.1m、総トン数9,530トン、最大喫水8.05m、マーシャルアイランド籍、バウスラスター670hp、乗組員16名、使用錨:ストックレス錨(637kN)
Atlantic Venus
全長179.9m、総トン数21,441トン、最大喫水6.4m、パナマ籍、乗組員20名
事故経過
5月8日N号は事故現場より8マイルの岸壁で鉛精鉱の積荷を終了しました。
1320:パイロットはN号を明朝修理予定の錨地に嚮導するため乗船
1350:パイロット嚮導の下、N号は錨地へ向かう
パイロットは、船長及び一航に予定錨地をECDISに示し、最初右舷錨を投錨、その後、左舷錨を投錨し右舷と左舷の錨鎖を“適当な広がり”(good spread)にするという案を告げる。これは、午後この海域において、強風と突風の予報があったためである。
1515:錨地において、パイロットは、N号と空船のバルカーの間に、船首方位228度で右錨を投錨した。(水深約15m)
1520:また、その後左舷錨を船首方位242度で投錨 右舷錨は4節(110m、甲板)とし、左舷は3節(82m、海中)とした。

図-2 VDRによるN号位置。緑の錨マークは右錨投錨位置を表し、赤の錨マークは、左錨投錨位置を表す。(背景:NOAA ENC 6LA54M)
1532: パイロットは船長に「すべて終了、良い状態である」と告げ、さらに「潮流と気象を考慮し、短時間でスタンバイ可能となる状態(short standby)、及び短い錨鎖長(short leash)が望ましい」と告げる。
バルカーA号の船首は、N号船尾より下流約150mにあった。
1533:N号の船位と船首方位は、触れ回りにより一定していなかった。
1540:パイロットは、船橋を離れその後下船
船橋当直の2等航海士は、ECDISの走錨監視アラームを起動させ、最大半径を180mに設定しましたが、これは本船の全長と錨鎖長より出したと説明しました。しかし事故後その根拠は忘れたと言っています。

図-3 1533時から1547時までのVDRによるN号の最初の動き。(スケールは概略)。
1557:N号は触れ回り続け(対地速度1.8ノット)A号の右舷船首から107mの位置となる
1602:1等航海士と2等航海士は、守錨当直を交代する。1等航海士はECDISに詳しくなく、2等航海士に対し、何故本船は、ECDISの守錨円のセンターにいないのか尋ねた。2等航海士は1等航海士に対し、ECDIS操作について手伝うと申し出たが、その後錨地における位置についての議論は無かった。
1613:A号の当直航海士は、VHFでN号を呼び出し、錨泊位置を監視するよう要請した。
1639:N号1等航海士は、「我々は近すぎる」と言い、2等航海士にA号までの距離を聞いた。2等航海士は、左舷レーダーにより、A号までの距離は「0.3ケーブル」(55m)と答えた。
1640:1等航海士は機関長に船橋に来るように要請した。(その後機関用意)
1641:A号船長はN号をVHFで両船が近く不安全な状況であると告げる。
1642:1等航海士は船長に、後ろ側の船が非常に接近していると報告し、船長は直ちに昇橋。その時N号の船尾とA号船首の距離は45mであった
1645:N号船長はVTSに連絡、「位置を変える」ためパイロットが必要であると告げた。VTSは、代理店に連絡しパイロットを手配するようにと答えた。
1647:VTSは、N号に対し、「貴船は走錨しているか、動いているようだ」そして「錨は揚げないようにし、・・・機関を使って安全にその場にとどまれ・・・錨を上げるな・・・パイロットを待て」と告げた。
1649:船長は代理店に電話してパイロットを要請したが、パイロットは、2-3時間都合がつかないと答えた。船長は、船首の触れ回りを抑えるため、バウスラスターや舵とともに機関を前進全速で使用した。
1655:N号の左舷がA号のバルバスバウ及び錨鎖に衝突した。
1725:最初の救助タグが到着し、N号位置を保った。30分後2人のパイロットが現場に到着しN号及びA号に乗船した。
1856:N号の速力は岸壁方向に増加したため、パイロットは機関、舵の操作を種々行う。
1858:N号の船首は、6ノットで岸壁に衝突し、船首は浅瀬に座礁した。

図-4 N号が1515時右錨投錨した時から、1655時A号に衝突するまでのECDIS上のGPS位置。注:GPS受信機はN号の船橋上のメインマストに設置(背景:NOAA ENC 6LA54M)
分析 (NTSB)
1) 走錨
N号の位置と船首方位は、錨地において当初から安定しておらず、 右舷錨が投錨された後、投錨位置から浅瀬方向に約220m移動しました(1546時頃)。これは、右舷の進出した錨鎖の2倍の距離であり、右舷錨が走錨した可能性があることを示しています。 最初の6分間の走錨は(1539時~1545時)、パイロットが船長に投錨が終了したことを通知(1532時)してから10分以内に始まりました。
パイロットは、船がまだ動いている間に下船しました(1540時)。
パイロットが下船する前に、船橋チームや船長が走錨に気付く、あるいは走錨の懸念があった場合、パイロットが問題に対処するため、船に留まるように要求できた可能性があります。
2) ECDIS
二等航海士と一等航海士はどちらも、ECDISがN号の錨泊位置を監視する手段であると述べました。特に近くの危険物や天候、潮流のリスクが存在する海域で、停泊中の船舶を監視するには、継続的な警戒状態と、船舶が走錨しているかどうかを判断するためのすべての利用可能な手段の使用が必要です。
二等航海士は、ECDIS走錨監視アラームを設定しましたが、これは、本船が設定された半径を超えて移動した場合に鳴っていたはずです。二等航海士も一等航海士も、走錨監視アラームが作動したことを思いだせません。N号の船尾からA号の船首までの最初の推定距離が150mであったとすると、180mに設定した走錨監視アラーム半径は大きすぎて、走錨をタイムリーに警報することはできませんでした。(著者注:走錨監視円の中心をどこに設定したかは、NTSB報告書では記載されていない)
1551時から1557時までに、本船は右舷に振れ周り始め、走錨し約6分間で約244m移動しました。
一等航海士が当直を交代したときに、船が走錨監視円の中心にないことに気づきましたが、船が走錨したか、または船が錨地にしっかりと留まっているかどうかを質問しませんでした。
3) 船位の監視
一等航海士は当直交代時、N号がECDIS走錨監視円の中心にいないことに気付いた後、船の位置をクロスチェックしませんでした。一等航海士は、A号が彼らの錨泊位置を監視するように最初に警告した後でも、懸念に対応するためのフォローアップ措置を講じませんでした。
当直航海士は、ECDIS走錨監視アラーム以外の手段で、船の位置をチェックしたかどうかを示す証拠はありませんでした。船のレーダーは、船や物体までの距離が減少したか、あるいは錨泊中に船が動いたのかを乗組員が判断またはクロスチェックするための情報を提供します。
N号が確実に錨泊していないことを船橋チームに警告する十分な証拠があり、これが機能していたならば、船長はより早期に警戒した可能性があり、次に、問題を対処するために必要な措置を講じるのに十分な時間があったでしょう。
4) New Orleans Vessel Traffic Service (VTS)
船長は、VTSと代理店に連絡してパイロットを要請しましたが、何時間も待たなければならないと知らされました。 VTSはN号に、パイロットが到着するまで錨を上げず、エンジンだけで操縦するように指示していました。 船長はVTSの指示に従い、錨をそのままにしておきました。 しかし、これにより、主機の全速前進や、バウスラスター、および舵を使用した場合でも、川の強流により船舶を制御しようとするブリッジチームの能力が大幅に制限されました。
推定原因(NTSB)
N号の船橋チームが船の位置を効果的に監視していなかったこと、したがって本船が走錨し、川の高流速の中、元の錨泊位置から近接した他の船舶に移動したことを検出しなかったことであると、結論づけました。
検討/解説
本事故においては、次に示すように多くの不安全状態及び不安全行為がみられます。これらの一つ、あるいは連鎖により本事故は発生したものです。走錨事故を防止するには、これらの不安全状態や不安全行為を認識し、できれば事前に改善することが重要です。
1) 錨地の選定
錨泊中、川には強い流れ(4~5ノット)があり、また後に強風が予想される中、前後の船舶との距離が非常に近くなるという錨地の選定については、疑問の残るところです。このような環境の中で、錨泊後の後ろの船舶との距離は150mであり、これはGood Seamanshipとは言えないでしょう。
2) 錨泊方法の良否
川の流れが一定であり、また、強風も予想されるということで、2錨泊法(左右両方の錨を使用)を採用したことは、この海域では通常の運用方法かもしれません。しかし、右舷錨鎖4節甲板上(110m)、左舷錨鎖3節海中(82m)という錨鎖配置では十分な把駐力が得られません。
一般に、2錨泊の場合、両舷の錨鎖の角度が120度の場合、単錨泊と同様の把駐力になると言われています。本件では、図-2からは両錨鎖の角度が正確にはわかりませんが、120度近いと思われます。従って、把駐力も単錨泊程度(錨:637kN)であり、振れ周りが予想される場合、側面からの流圧や風圧には十分では無かったのではと予想されます。
3) ブリッジ・チーム・マネジメント(BTM)
1等航海士はECDISに不慣れであり、2等航海士に本船位置がなぜ、ECDISの走錨警報サークルの中心に無いのか聞きました。しかし、1等航海士は、十分な回答を得られず、その議論も終了しています。
これはBTMにおける基本的なことで、どちらかに疑問があれば、それを確認しあうということの欠如となります。
また、パイロットは、錨泊状態を「良い状態である」といい、結果的に、走錨が始まる直前、または走錨中に下船してしまいました。この時、船長や1等航海士は、錨の状態をパイロットの言だけで無く、自身で確認しなければなりません。そしてその時、把駐状況や振れ回り状況、また錨鎖の状態などを確認して、疑問があればパイロットに確認すべきでしょう。
従って、本船では、パイロットを含むブリッジチームにおいて、BTMの脆弱性をみることができます。
4) 守錨当直(監視、対応等)
本件では、守錨当直に関し、十分に対応しているとは言えません。守錨とは、概略次の作業を言います
- 投錨位置の測定及び確認し、触れ回り円を作成
- 錨位の確認(走錨の検知)本船位置に関し、定期的に目視を含め複数の手段で取得し、触れ回り円内に本船があることを確認する。
- 周囲の状況の確認(他船や障害物)
- 気象海象の観測
走錨が疑わしい場合、他船の近接、また、錨泊に影響のあるような気象海象の急変など見られた時は、直ちに船長に報告し、その対応をしなければなりません。
走錨の監視に関しては、現在は、本件でもあるようにECDISの機能を使用して、走錨を確認することができます。本事故では残念ながら、この機能を十分に利用したとは言えないでしょう。ECDISの機能を使用する場合においても、振れ回り円を正しく作成し、それに伴うECDISの設定をしなければなりません。
(注:本件報告書では、振れ回り円の中心をどこにしたか、明示されていない。また振れ回り円の半径を、2等航海士は180mにしたが、その根拠については正確に答えていない)
ここでは、単錨泊の場合の振れ回り円の作成について、簡単に説明します。
ステップ-1)投錨時の本船の位置(船橋)と船首方位を記入する。
ステップ-2)測位点(船橋)から船首までの距離を加味して投錨位置を確定する。
ステップ-3)投錨位置を中心として、旋回円(半径=伸出錨鎖長さ+船の全長)を記入する。

図-53 振れ回り円の作成
この振れ回り円の外に本船が出た場合、走錨の疑いがあります。なお、ECDISが採用されて以降、走錨監視には、「走錨監視(Anchor Watch)」(機種により名称異なる)機能を使用し、走錨監視サークルをECDIS上に設定することができます。この場合でも、目視やレーダー等により本船位置を定期的に確認することは言うまでもありません。

図-6 ECDISにおける走錨監視画面例(JRC)
5) 走錨時の対応
もし、走錨が始まった場合、あらゆる手段を用いて走錨から逃れなければなりません。第一にただちに揚錨しなければなりませんが、この場合次のような注意が必要です。
- 外力により揚錨機(ウインドラス)の容量が不足する場合がある。この場合、過度の操作により揚錨機が過負荷状態になり、揚錨機のダメージにつながり使用できなくなる可能性がある(例:A号座礁、2004年10月20日、伏木富山港)。
- 機関を使用する。これは風下に流されるのを抑えること、また外力の影響を緩和し揚錨を容易にすることができる。走錨時においてはこの機関使用が最も有効な手段となる。しかしながら、長時間過負荷状態で機関を使用することにより、排気温度の上昇等を引き起こし機関損傷の原因となることがあり注意を要する(例:B号座礁、2006年10月6日、鹿島港)
- その他の対応として、反対舷の錨が使用できる場合は、状況によりそれを投錨することで走錨を抑える。また、外部に連絡し救援のタグボートを要請することも必要であるが、荒天時にはタグボートの稼働が制限されることもあるので注意を要す。
- 捨錨4
外力の影響やウインドラスの故障により、本船の錨を巻き揚げることができず、これにより切迫した危険を回避するための航行ができない、あるいは環境の安全を脅かすおそれのある場合は、船長はただちに本船の航行を可能とする様に錨鎖の切り離しを検討しなければなりません。
この操作には、通常錨鎖庫外側にある錨鎖端(Bitter end)を切り離します。このため、切り離し用のクイックリリース装置を適切に整備しておくことが重要であり、また、緊急時にすぐに操作できる様にその方法についても乗組員は熟知しておく必要があります。
ここでは、本船上でどのように錨鎖を切り離すかを簡単に示します。図-7にあるとおり、チェーンロッカーの中に錨鎖の端となるビターエンドがあり、これはチェーンロッカーから容易に切り離すことが出来ます(クイックリリース)。

図-7 クイックリリース部とビターエンド
ビターエンドを切り離すには、ハンマーで、クイックリリースピンの赤い部分を左側に叩き、ピンをはずします。(図-8) 参考までに、クイックリリース部とビターエンドの構造に関し、図9及び図10に示します。

図-8 錨鎖のクイックリリース装置(ボースンストア内)

図-9 クイックリリース装置とビターエンド①(ピンが通常の位置にある場合)

図-10 クイックリリース装置とビターエンド②(クイックリリースピンを左側に抜いている状態)
このように走錨は船舶運航の中で起こり得ることであり、対応を間違えると、大きな事故につながります。従って、錨泊に関しては次の事項を予め検討し、事前に関係者間で情報共有(ブリーフィング)をすることが重要です。
- 錨泊予定地の確認(底質、水深、気象海象、近接物標等)
- 錨泊(投錨)方法
- 錨泊時にかかる外力や把駐力の計算及び守錨限界の確認
- 走錨監視体制と走錨監視装置の確認
船位確認のインターバルを決定
ECDISシステムを使用する場合、その操作を習熟
振れ回り円の設定
警報アラームの起動
- 走錨時の対応(上記)
以上
-----------------------------------------------------------
参考資料
1NTSB Accident Report MAB-21-15
Collision of Cargo Vessel Nomadic Milde and Bulk Carrier Atlantic Venus
2図-1から図-4 は、上記参考資料1)記載の図を基に筆者が作成
3実践航海術(成山堂書店、関根博監修)P210を参考に作成
4実践航海術(成山堂書店、関根博監修)P215-216を参考に作成
Related news
-

専門家に聞く:Michael Banning氏に聞く新燃料油基準
26/11/2024
-

-

-